Experimental Setup
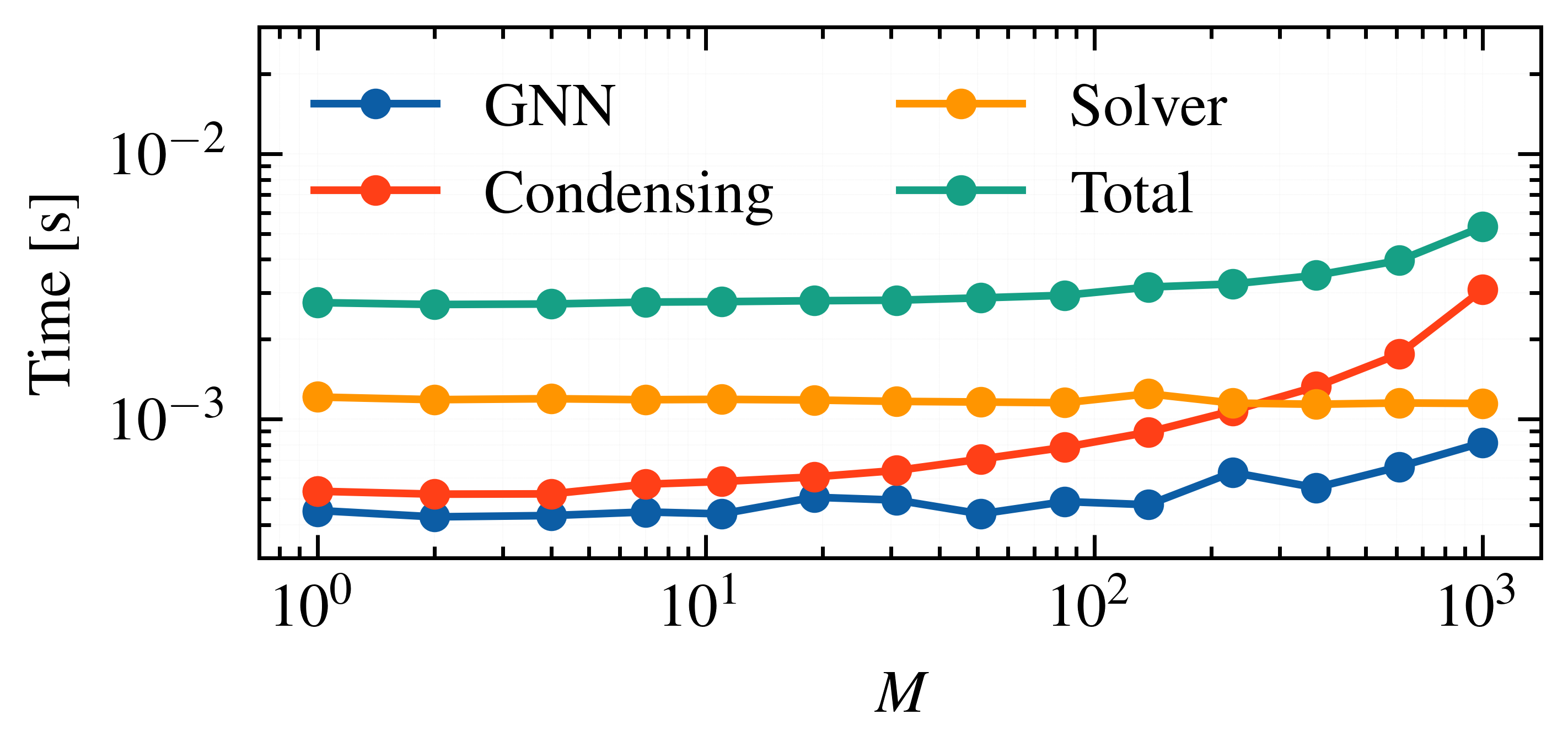
The GNN is trained in PyTorch Geometric and translated to Flax for JIT compilation. The condensing algorithm is implemented in JAX, leveraging vectorized mapping and GPU execution via XLA. The resulting QP is solved using the interior-point solver HPIPM within a Sequential Quadratic Programming (SQP) real-time iteration scheme.
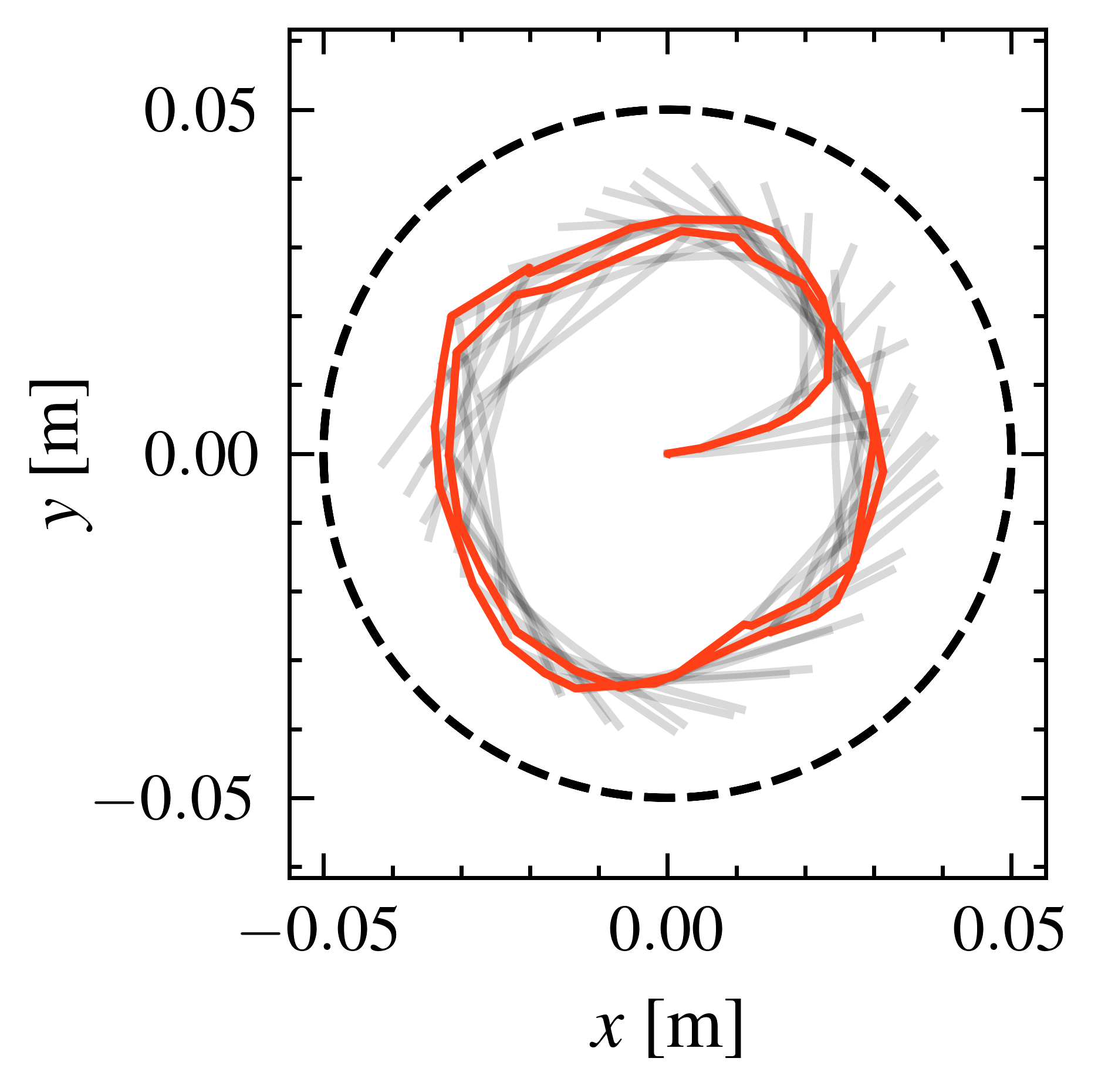
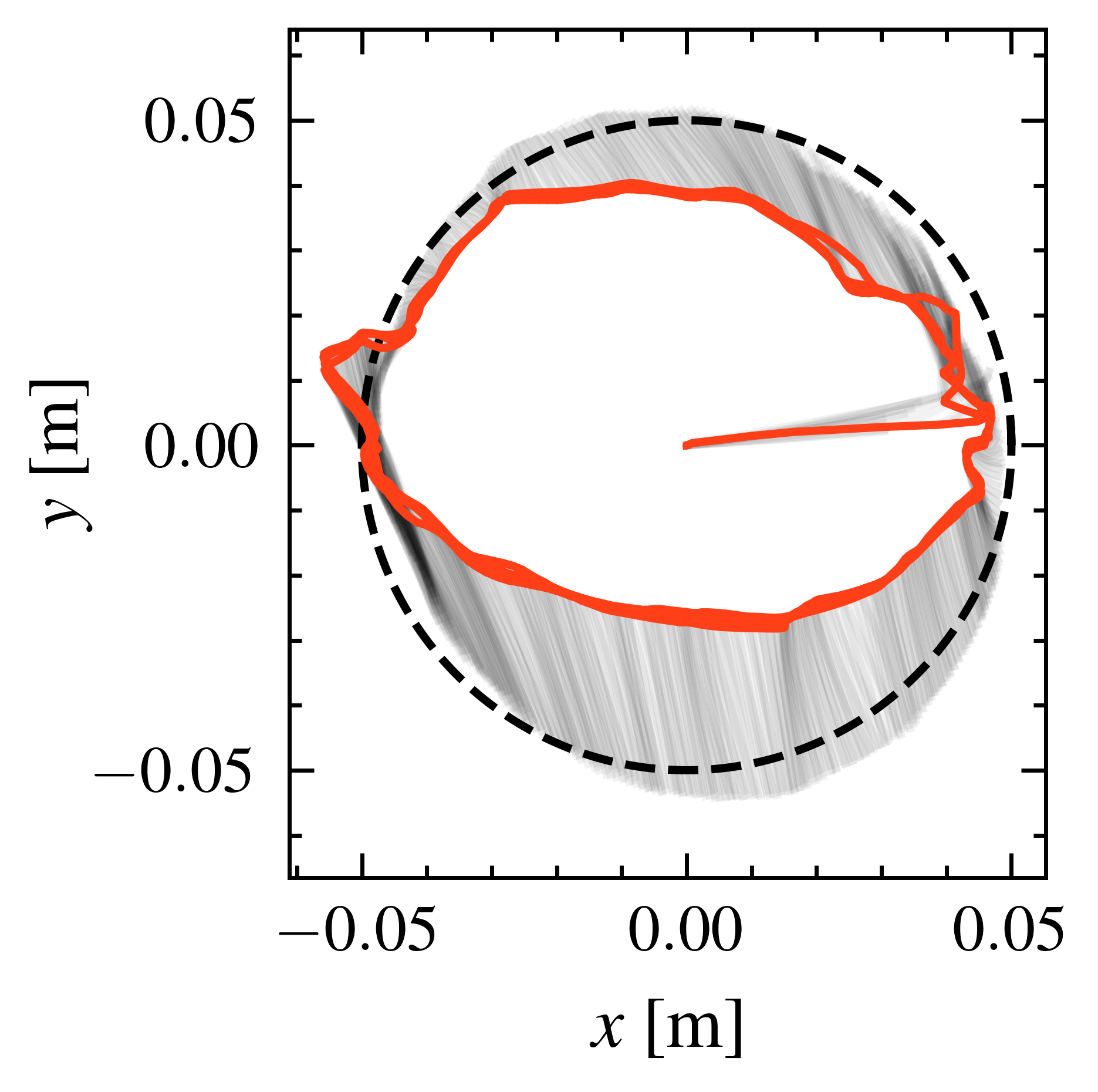
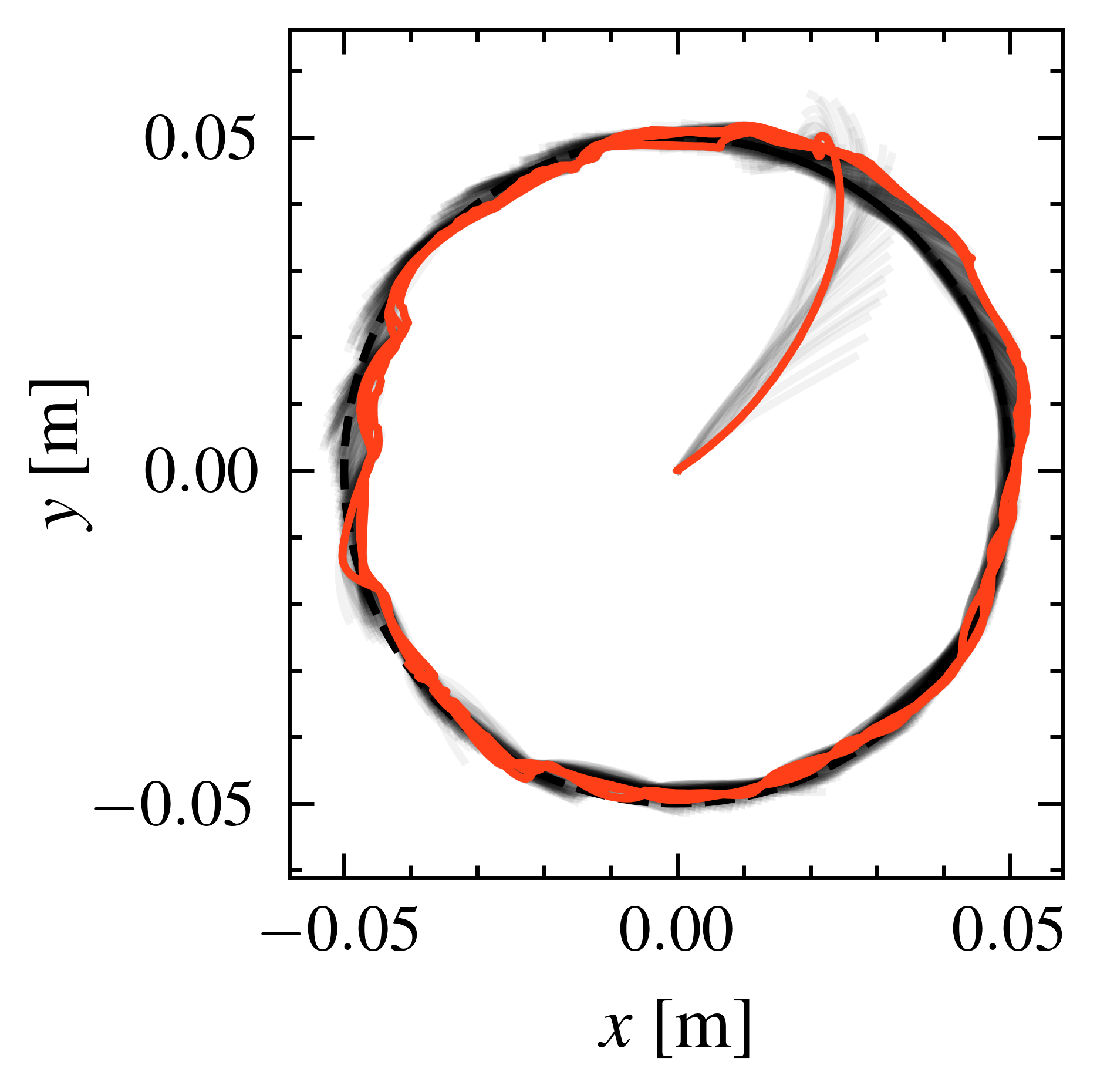
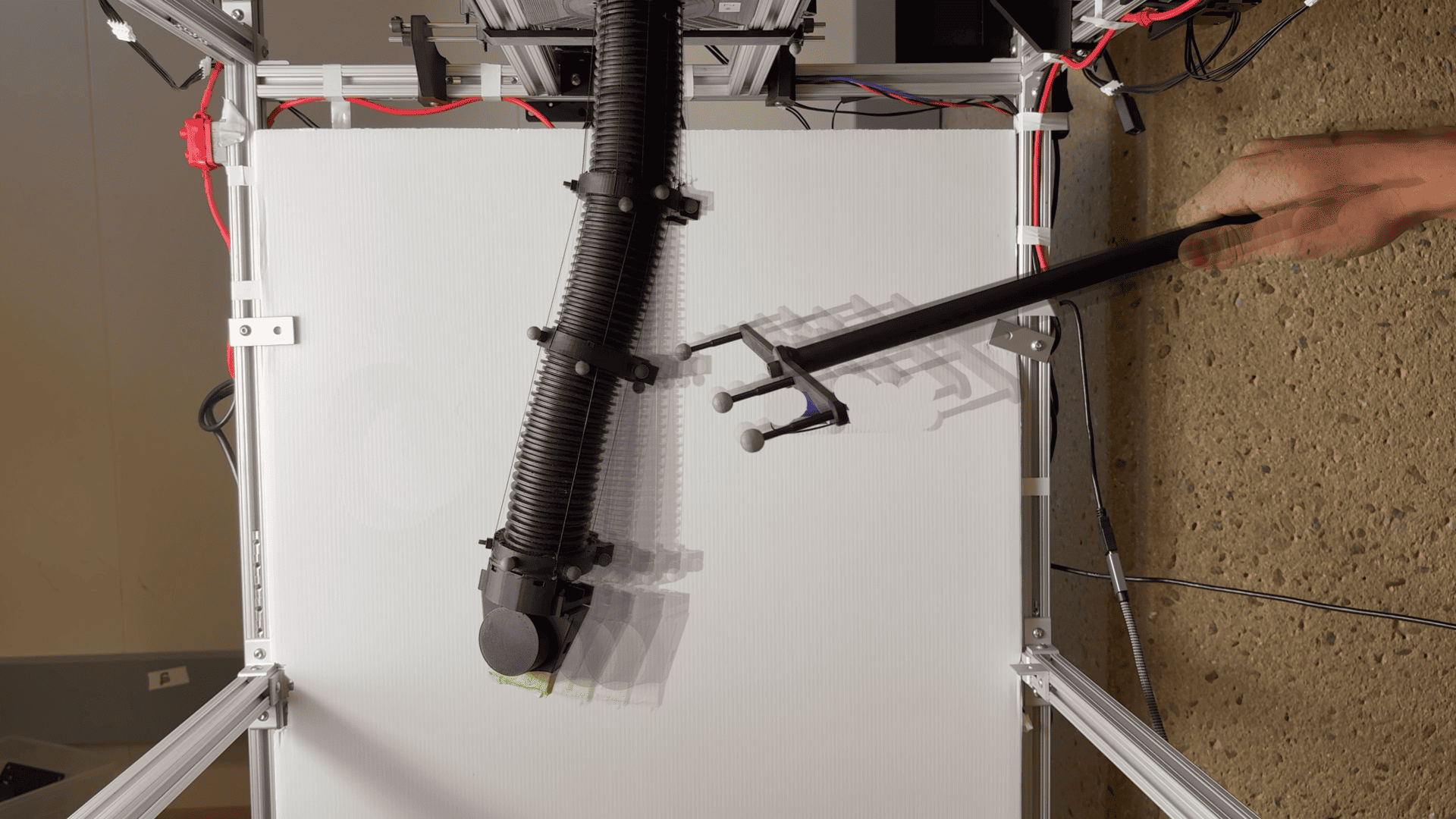
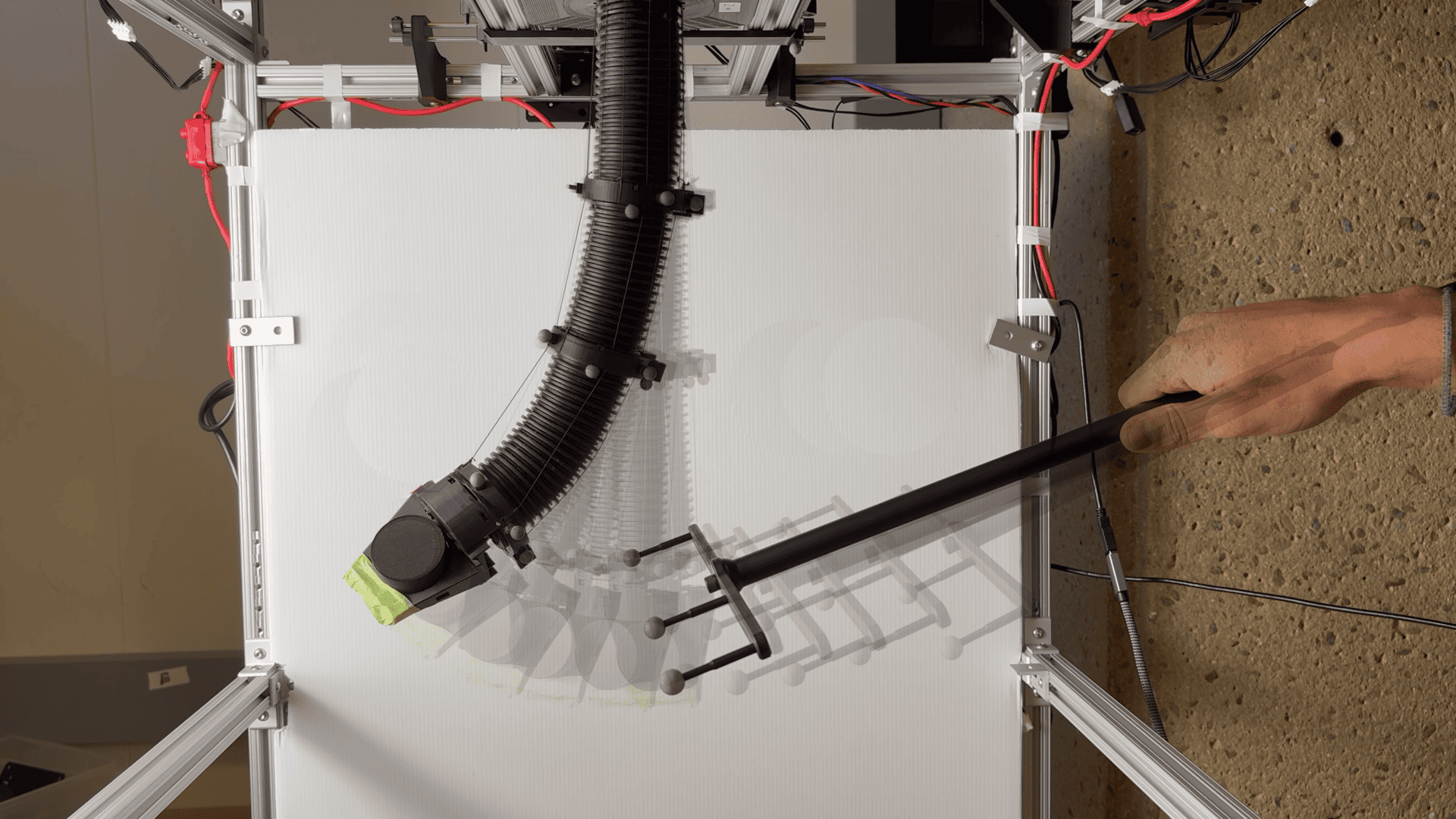
The simulation models a tendon-driven trunk robot in MuJoCo. Hardware experiments use the corresponding physical platform, tracked via an OptiTrack motion capture system at 100 Hz and actuated by 6 XM540 Dynamixel motors.
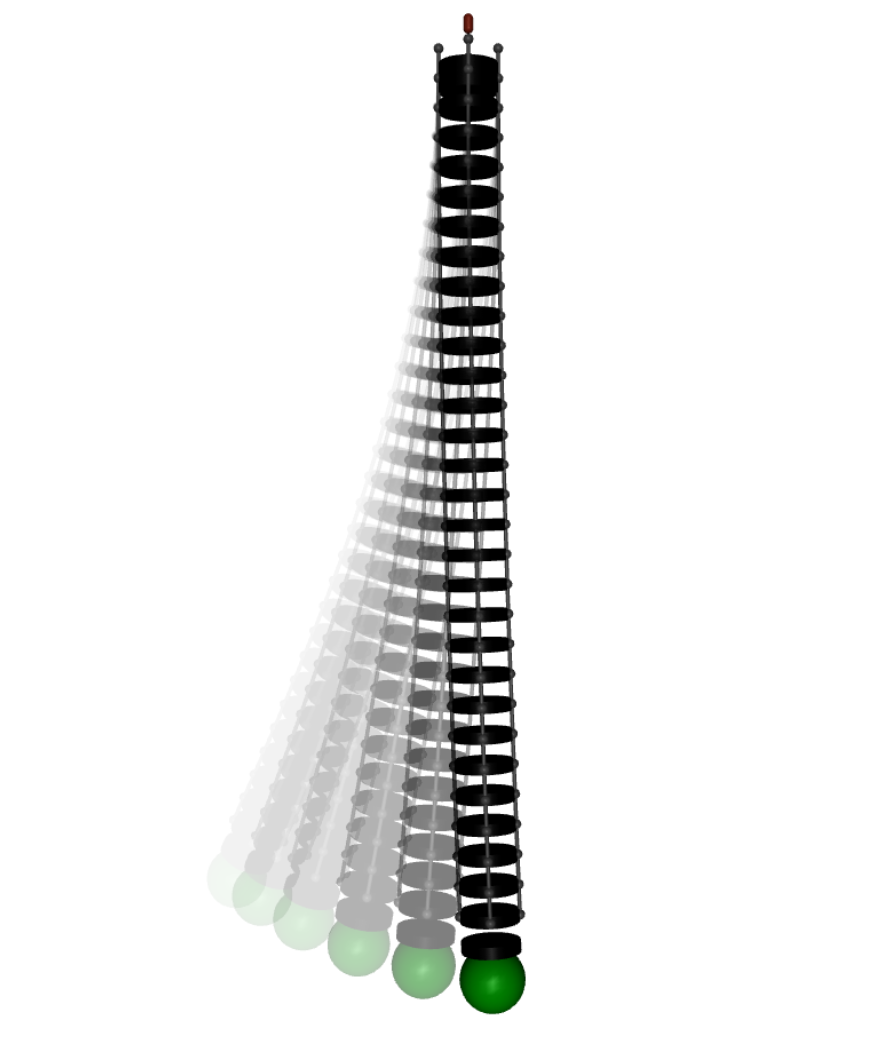
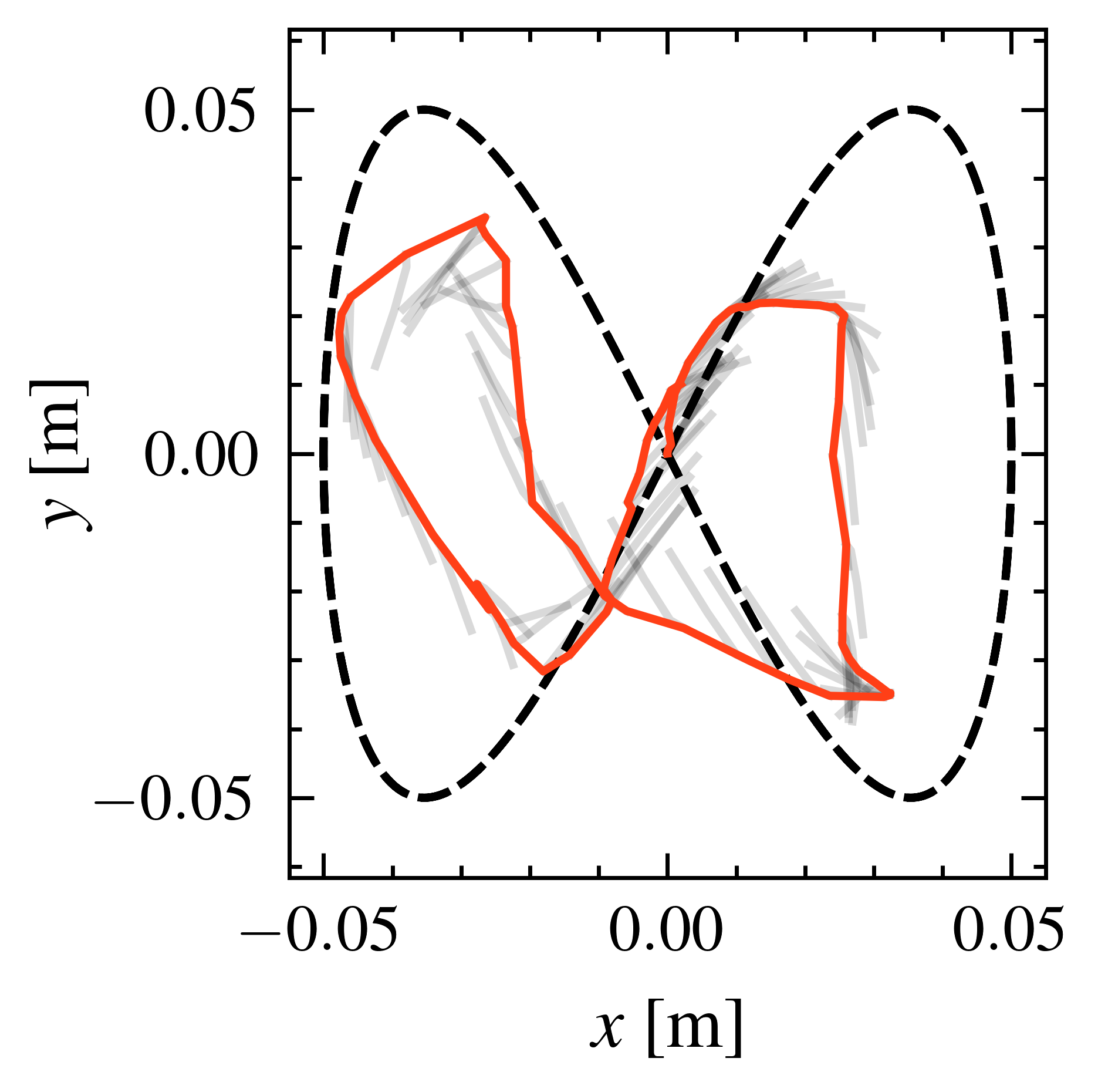
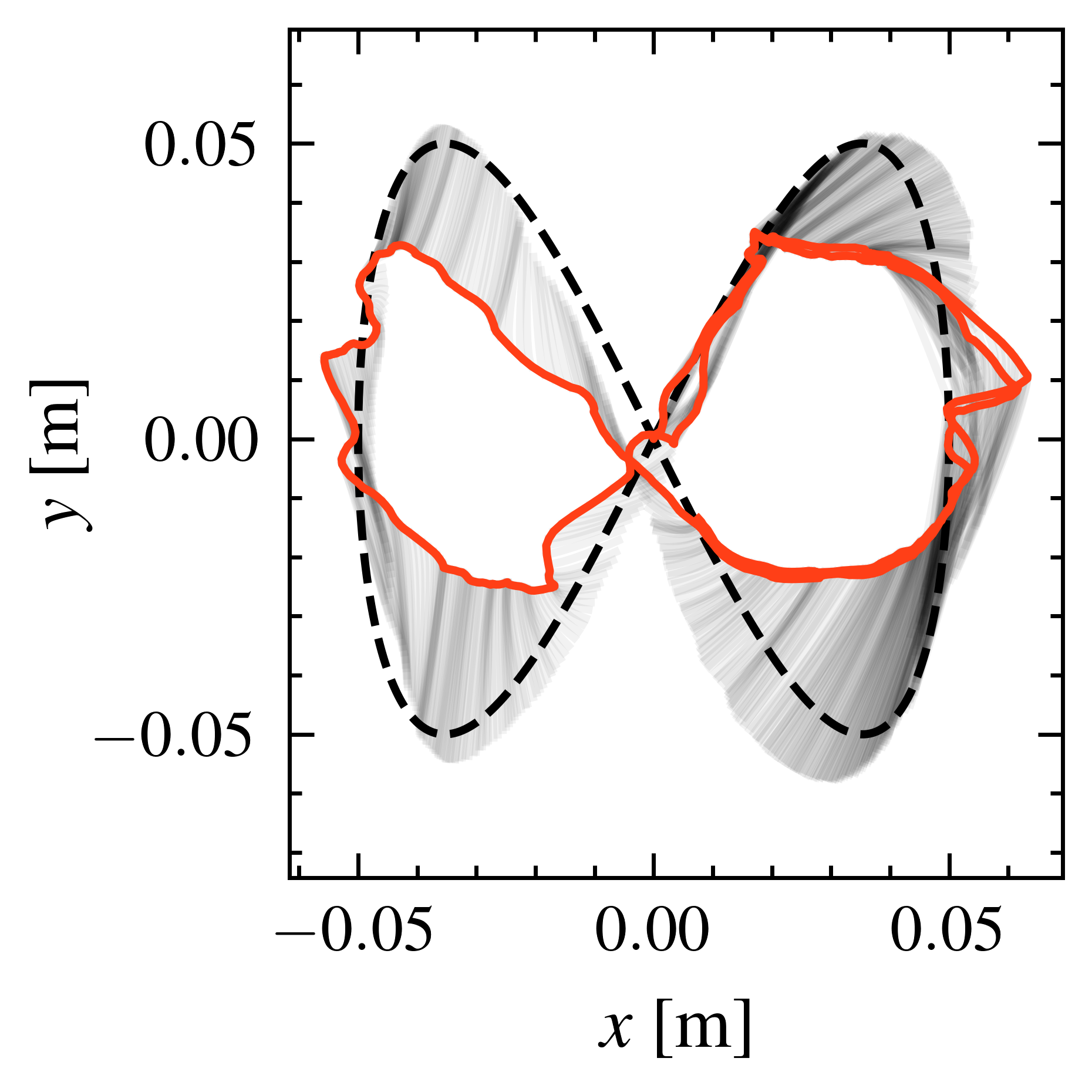
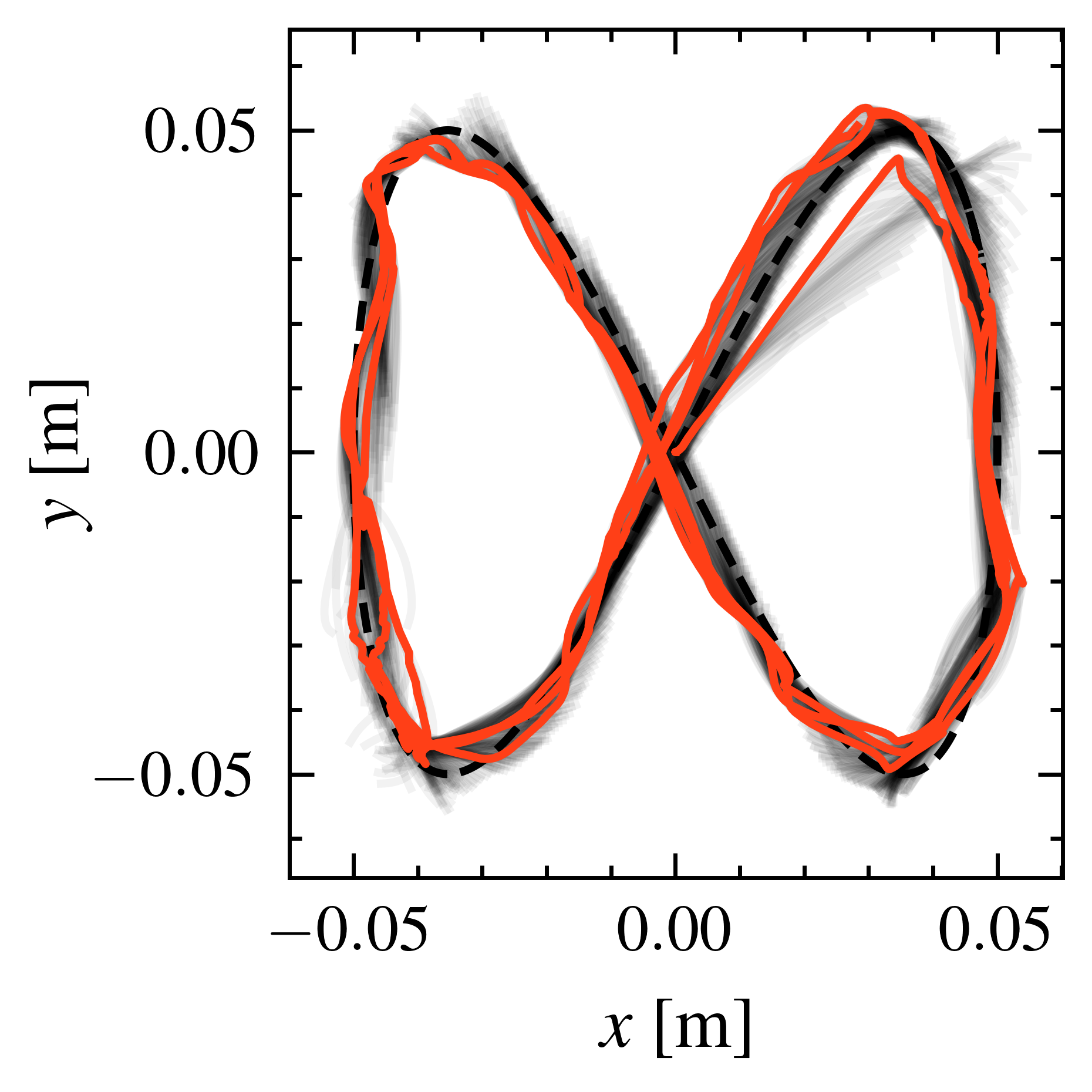
Simulated trunk robot
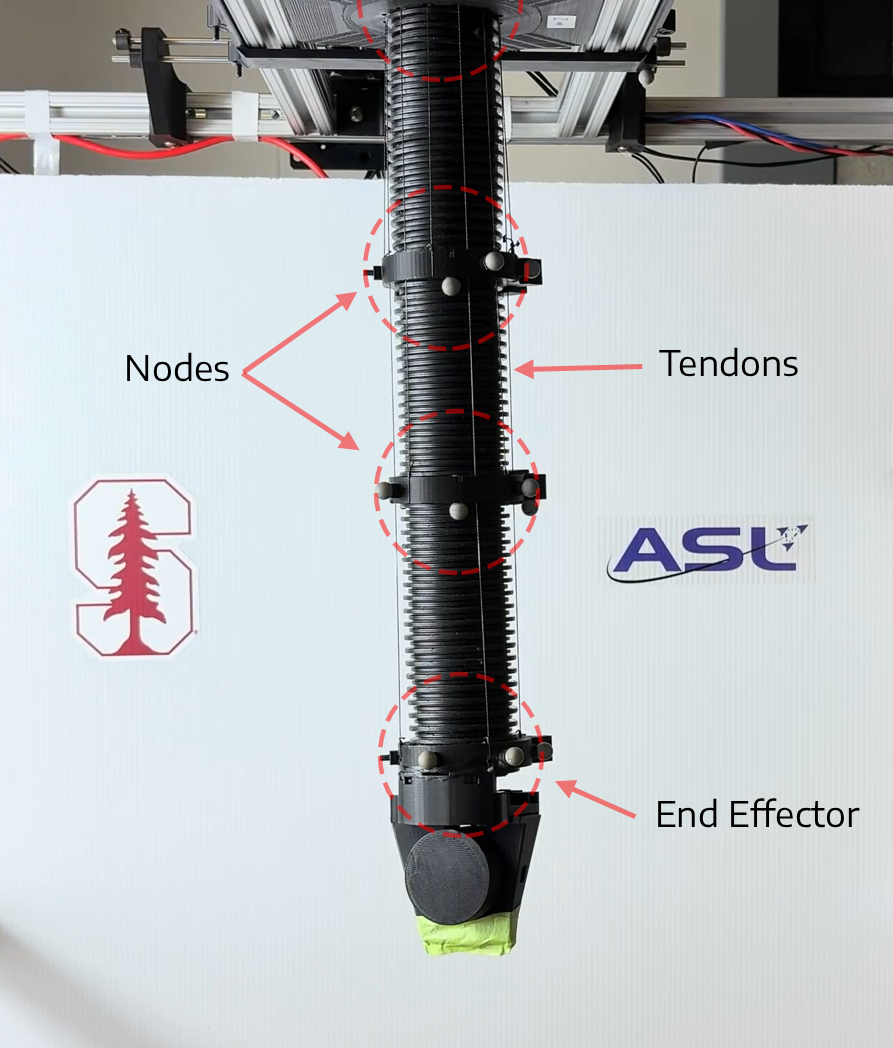
Physical trunk robot